Ein Mikrofon ist ein elektroakustisches Gerät, das akustische Energie in elektrische Energie umwandelt. Diese Umwandlung erfolgt über ein mechanisches System, in der Regel eine Membran, die durch ein Schallfeld in Schwingungen versetzt wird. Die mechanische Bewegung wird dann durch eine elektromagnetische Kopplung in ein elektrisches Signal umgewandelt.
Der Schall als physikalisches Phänomen wird entweder durch den Schalldruck, die Teilchengeschwindigkeit oder die Schallintensität beschrieben. Die meisten Mikrofone reagieren auf den Schalldruck, den Schalldruckgradienten oder eine Kombination aus beidem. Daher wird in diesem Abschnitt lediglich auf folgende Mikrofontypen eingegangen:
- Druckmikrofone
- Druckgradientenmikrofone
- Kombination von Druck- und Druckgradientenmikrofonen
Die obige Klassifizierung bezieht sich nicht auf das Wandlungsprinzip von Schallenergie in Elektrizität. Daher wird eine weitere Unterteilung vorgenommen:
- Dynamische Mikrofone
- Kondensatormikrofone
- Digitale Mikrofone
Kristallmikrofone, Heizdrahtmikrofone und Kohlemikrofone werden hier nicht beschrieben, da sie im professionellen Audiobereich keine Rolle spielen.
Druckmikrofone
Ein Druckmikrofon besteht im Prinzip aus einer Membran, die sich vor einer geschlossenen Kammer befindet. Eine Schalldruckwelle kann die Membran nur von einer Seite erreichen.
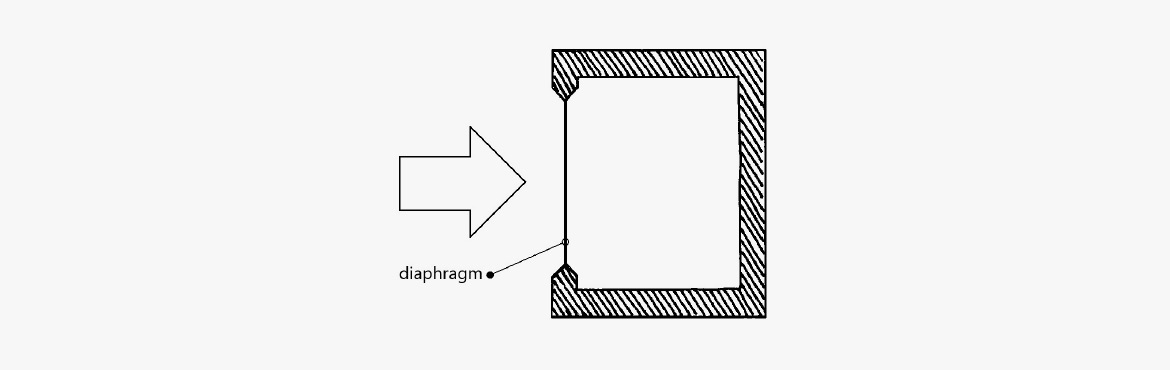 Abbildung 1. Prinzip eines Druckmikrofons – eine Membran vor einer geschlossenen Kammer (ohne Schallwandler).
Abbildung 1. Prinzip eines Druckmikrofons – eine Membran vor einer geschlossenen Kammer (ohne Schallwandler).
Ein Druckmikrofon kann mit einem Manometer zur Messung des Drucks in einer Flüssigkeit verglichen werden, das den Druck als richtungsunabhängigen Wert misst. Es spielt keine Rolle, in welche Richtung die Membran zeigt. Ausschlaggebend ist der Druck in der tatsächlichen Tiefe.
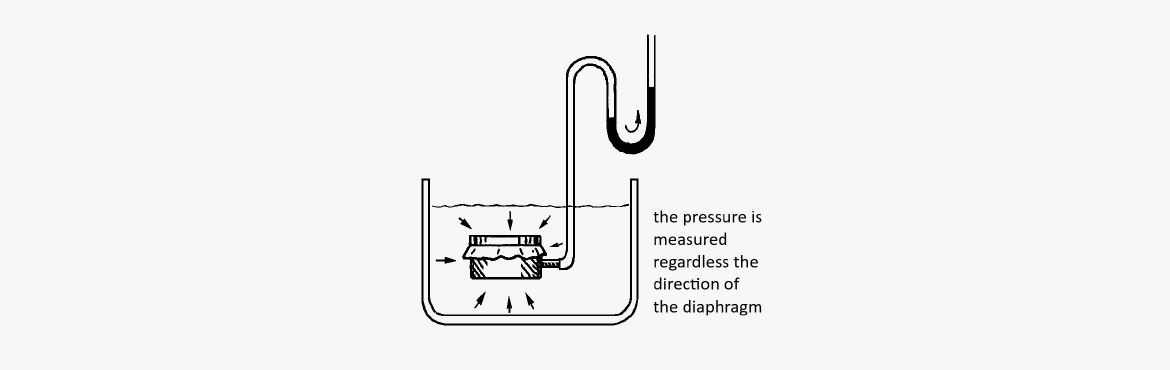 Abbildung 2. Prinzip eines Druckwandlers.
Abbildung 2. Prinzip eines Druckwandlers.
In ähnlicher Weise erfasst ein Druckmikrofon den Schalldruck unabhängig davon, aus welcher Richtung der Schall eintritt. Ein Druckmikrofon ist omnidirektional.
Die physikalischen Abmessungen des Mikrofons beeinflussen jedoch das Schallfeld, in dem es sich befindet. Bei höheren Frequenzen mit Wellenlängen, die kleiner als der Membrandurchmesser sind, kommt es zu einem Druckanstieg, wenn der Schall in Achse auf die Membran trifft. Das Ergebnis ist eine erhöhte Ausgangsleistung des Mikrofons.
Umgekehrt tritt, wenn der Schall von der Rückseite des Mikrofons kommt, ein besonderer Verschattungseffekt auf. Der Grad der Beeinflussung durch diese Phänomene hängt von den Abmessungen des Mikrofons ab. Je größer die Membran und die Abmessungen des Mikrofongehäuses sind, desto tiefer im Frequenzbereich liegt eine erhöhte Empfindlichkeit vor.
Wenn also der Schall die Membran nur von vorne erreichen kann, handelt es sich um ein Druckmikrofon und damit eine Kugelcharakteristik.
Druckgradientenmikrofone
Bei einem Druckgradientenmikrofon kann der Schalldruck die Membran sowohl von vorne als auch von hinten erreichen. Die Ausgangsspannung eines Mikrofons ist proportional zum Druckgradienten, d.h. zum Druckunterschied zwischen Vorder- und Rückseite der Membran. Wenn der Schall von der Seite kommt, herrscht auf beiden Seiten der membran der gleiche Druck. Dann gibt es kein Gefälle und somit auch kein Signal aus dem Mikrofon.
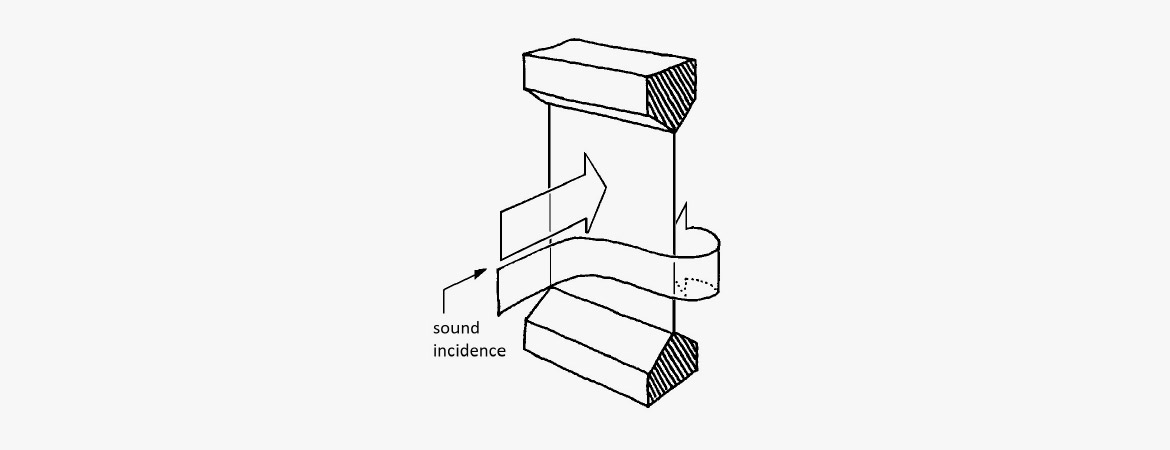
Abbildung 3. Prinzip eines Druckgradientenmikrofons
Ein Druckgradientenmikrofon ist bidirektional und weist die Richtcharakteristik einer Acht auf. Wie bei Druckmikrofonen sind auch die Eigenschaften von Druckgradientenmikrofonen eng mit dem Schallfeld verbunden, in dem sie aufgestellt sind.
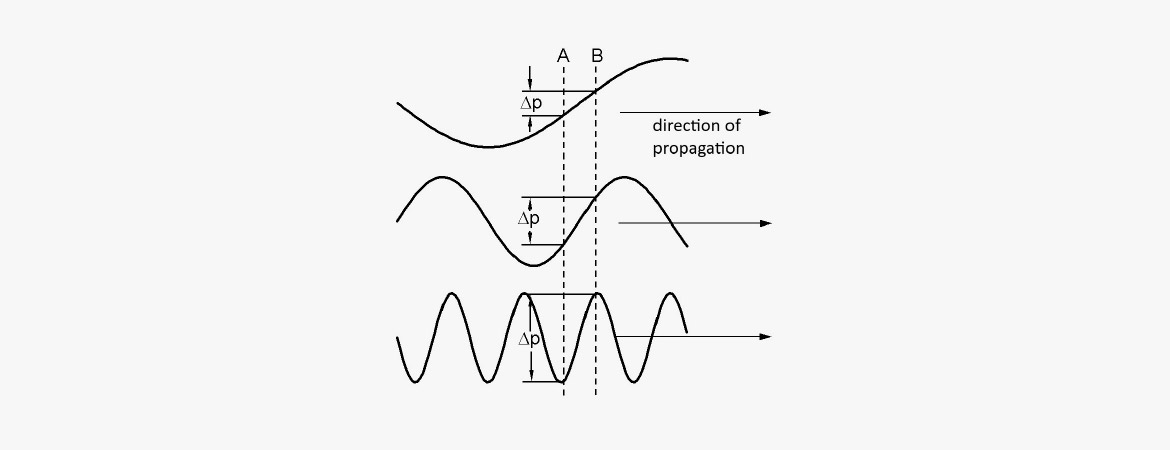 Abbildung 4. Druckgradient bei verschiedenen Wellenlängen.
Abbildung 4. Druckgradient bei verschiedenen Wellenlängen.
Der Unterschied im Schalldruck hängt von der Wellenlänge des Signals ab. Tiefe Töne, d.h. Frequenzen mit einer großen Wellenlänge, größer als der Abstand zwischen Vorder- und Rückseite der Membran, ergeben nur einen geringen Druckunterschied. Mit zunehmender Frequenz nimmt die Druckdifferenz zu und damit auch die Membranbewegung. Die maximale Membranbewegung wird bei der Frequenz erreicht, bei der die halbe Wellenlänge gleich dem Abstand zwischen Vorder- und Rückseite der Membran ist.
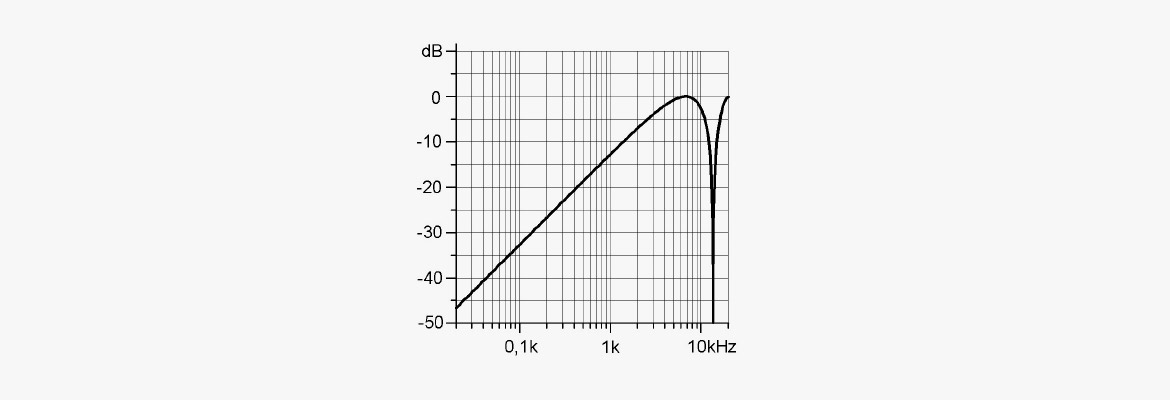 Abbildung 5. Druckunterschied zwischen zwei Punkten einer Schallwelle
Abbildung 5. Druckunterschied zwischen zwei Punkten einer Schallwelle
Bei Mikrofonen mit Standardgröße geschieht dies bei etwa 5 – 10 kHz. Bei kürzeren Wellenlängen werden die Bedingungen noch komplizierter, und die Achter-Charakteristik muss durch mechanische Konstruktionen unterstützt werden, die für Abschattungs- oder Interferenzeffekte sorgen.
Dem "unbearbeiteten" Frequenzgang eines Druckgradientenmikrofons fehlt es an Bass. Die Steilheit der Kurve beträgt +6 dB / Oktave. Damit das Mikrofon einen angemessenen Tieffrequenzgang aufweist, werden bei der Konstruktion verschiedene Techniken eingesetzt, um einen linearen Frequenzgang zu erzielen. Ein Ansatz besteht darin, die Membran schlanker zu machen, was zu einer geringeren Resonanz führt (wie beim Stimmen einer Trommel). Je nach Konstruktion und der erforderlichen Empfindlichkeit gibt es einen Roll-Off von 12 dB / Oktave unterhalb der Resonanz. Alle Gradientenmikrofone weisen an einem bestimmten Punkt eine Tiefenabsenkung auf.
Bei Druckgradientenmikrofonen kommt noch ein weiterer Faktor ins Spiel. Wenn sich die Schallquelle in der Nähe des Mikrofons befindet, kommt es zu einer Bassanhebung. Dieses Phänomen wird als Nahbesprechungseffekt bezeichnet. Dieser Effekt ist auf das quadratische Abstandsgesetz zurückzuführen (das Gesetz des Verlusts von 6 dB pro Entferhnungsverdopplung von einer Schallquelle). Dieser Effekt kommt bei kurzen Entfernungen zum Tragen.
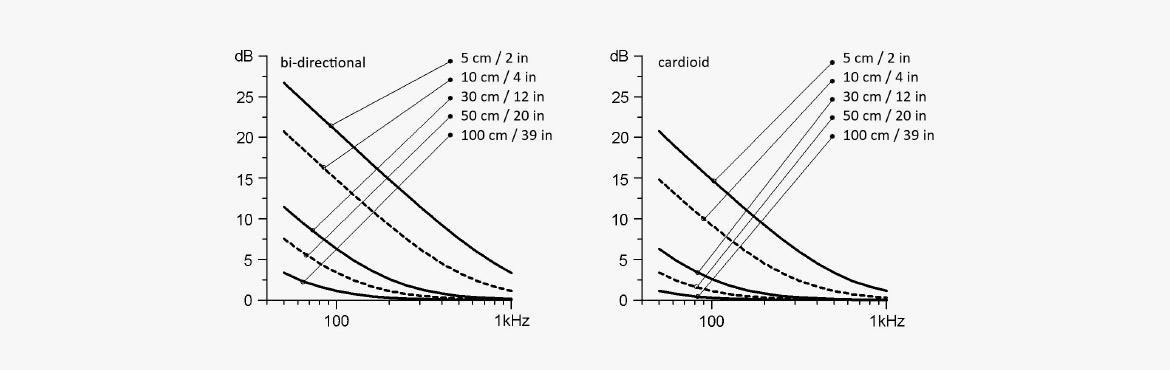 Abbildung 6. Der Nahbesprechungseffekt: Bassanhebung in Abhängigkeit vom Abstand zur Schallquelle, bidirektionale Mikrofone und Nierenmikrofone
Abbildung 6. Der Nahbesprechungseffekt: Bassanhebung in Abhängigkeit vom Abstand zur Schallquelle, bidirektionale Mikrofone und Nierenmikrofone
Befindet sich z.B. eine Punktschallquelle 2 cm von einer Membran entfernt und beträgt der Abstand von der Vorderseite zur Rückseite der Membran ebenfalls 2 cm, so beträgt der Druckunterschied 6 dB. Dieses Differenzprinzip gilt für den gesamten Frequenzbereich. Da jedoch der Druckunterschied bei niedrigen Frequenzen gering ist, führt die zusätzliche Differenz zu einer erhöhten Leistung bei niedrigen Frequenzen. Mit anderen Worten: Wenn die Schallquelle näher an das Mikrofon herankommt, erhält der Ton mehr Bass.
Kombinierte Druck- und Druckgradientenmikrofone
Kombiniert man das Druck- und das Druckgradientenprinzip, erhält man ein Richtmikrofon mit breiter Niere (Subniere), Niere, Superniere und Hyperniere. Die Kopplung der beiden Prinzipien kann entweder mechanisch oder elektrisch erfolgen.
Bei der mechanisch-akustischen Kopplung wird der Teil des Schalls, der auf die Rückseite der Membran wirkt, durch eine oder mehrere Öffnungen des Mikrofongehäuses geführt. Durch Variation der Größe und Dämpfung dieser Öffnungen lassen sich die Eigenschaften von Kugelcharakteristik (vollständig geschlossenes Mikrofongehäuse) bis hin zu bidirektionaler Charakteristik (Schall kann gleichermaßen Vorder- und Rückseite der Membran erreichen) einstellen. Diese Form der Kopplung kann sowohl für dynamische als auch für Kondensatormikrofone verwendet werden.
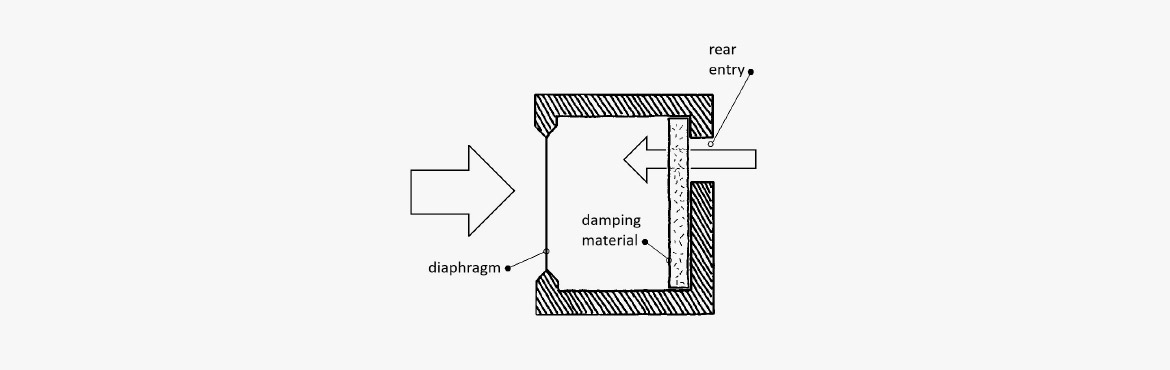 Abbildung 7. Dieses Mikrofongehäuse lässt den Schall in die hintere Öffnung eindringen, wodurch ein Druckunterschied entsteht.
Abbildung 7. Dieses Mikrofongehäuse lässt den Schall in die hintere Öffnung eindringen, wodurch ein Druckunterschied entsteht.
Durch teilweises Verschließen der Membranrückseite wird die Öffnung mit porösem oder perforiertem Dämpfungsmaterial verdeckt, so dass der Schall verzögert passieren kann. Durch diese Technik wird sichergestellt, dass der rückseitig eintreffende Schall (180° auf Achsenrichtung) gleichzeitig die Vorder- und Rückseite der Membran erreicht. Dies führt dazu, dass sich die Membran nicht bewegt und das Mikrofon sich so verhält, als sei es unempfindlich gegenüber rückseitigem Schall. Bei anderen Schallrichtungen (¹≠180°) hat die Membran eine erhöhte Empfindlichkeit. Dieses Mikrofon verfügt über eine Nierencharakteristik.

Abbildung 8. Beispiel für ein kombiniertes Druck- und Druckgradientenmikrofon.
Indem die Dämpfung des Schalls auf der Rückseite der Membran bis zu einem gewissen Grad verändert wird, wird das Mikrofon unempfindlich gegenüber Schalleinfall aus einem Winkel von 120° außerhalb der Achse. Es handelt sich um ein Mikrofon mit Supernierencharakteristik, das für direkt von hinten eintreffendem Schall leicht empfindlich ist.
Die elektrische Kopplung zwischen dem Druck- und dem Druckgradientenprinzip wird normalerweise nur bei Kondensatormikrofonen durchgeführt. Diese Art der Kopplung lässt sich leicht variabel gestalten und wird im Abschnitt über Kondensatormikrofone beschrieben.
Das Mikrofon im Schallfeld
Da sich das Mikrofon im Schallfeld befindet, hat es bei hohen Frequenzen einen störenden Einfluss darauf. Es kommt teilweise zu einer Beugung um das Mikrofon herum sowie zu einer teilweisen Reflexion an der Vorderseite der Membran, was einen Druckaufbau zur Folge hat.
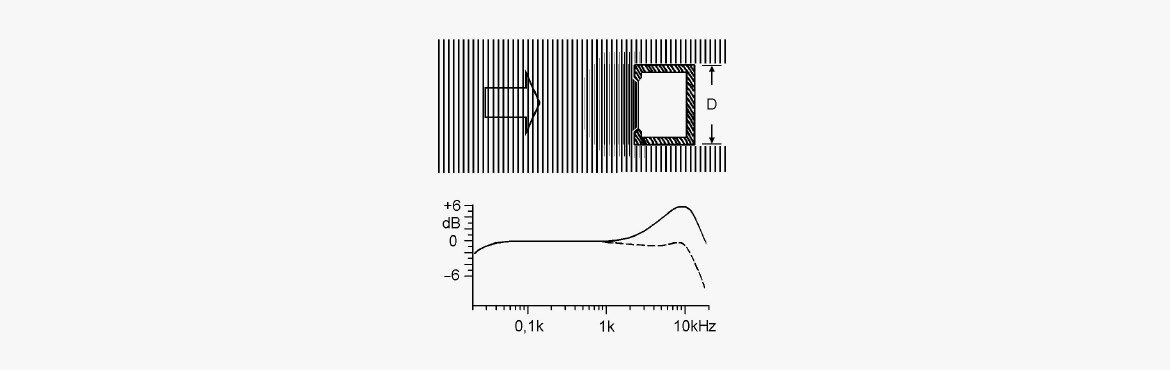 Abbildung 9. Druckaufbau bei Wellenlängen, die gleich dem Durchmesser und kürzer als dieser sind.
Abbildung 9. Druckaufbau bei Wellenlängen, die gleich dem Durchmesser und kürzer als dieser sind.
Druckmikrofone werden am meisten durch ihre physikalischen Abmessungen beeinflusst. Ihre kugelförmige Charakteristik ändert sich mit zunehmender Frequenz zu einer engeren Charakteristik. Gleichzeitig kommt es zu einer Druckakkumulation, weshalb der Frequenzgang bei hohen Frequenzen einen Anstieg von mehreren dB in Achsrichtung aufweist.
Die Bauart von Druckmikrofonen weist oft einen Roll-Off bei höheren Frequenzen auf. Wenn ein Grid vor der Membran angebracht wird, weist dieser Hohlraum eine Resonanz auf, die die höheren Frequenzen anhebt, um den gewünschten linearen Freifeld- oder Diffusfeldfrequenzgang zu erzielen.
Außerdem können verschiedene Zubehörteile verwendet werden, wie z.B. akustische Druckausgleicher (APEs). Diese Geräte erhöhen den Frequenzgang und die Richtwirkung weiter.
Ein Druckgradientenmikrofon mit einer Achter-Charakteristik kann bis zu seiner Grenzfrequenz ohne Beugungsprobleme konstruiert werden. Oberhalb der Grenzfrequenz können Beugung und Druckaufbau den abfallenden Frequenzgang teilweise korrigieren.
Bei der Tonaufnahme in Räumen, in einer Entfernung von bspw. 1-2 m von der Schallquelle, wird der eingefangene Schall neben dem direkten Schallfeld auch durch das diffuse Schallfeld erheblich beeinflusst.
Ein typisches Designziel für Druckgradientenmikrofone ist es, die Freifeld- und die Diffusfeldcharakteristik möglichst parallel über den Frequenzbereich verlaufen zu lassen. Dadurch kann man den „räumlichen Effekt“ in der Aufnahme, d.h. das Verhältnis von Direktschall und reflektiertem Schall, anpassen, ohne die Frequenzbalance des Mikrofons zu verändern.
Bei Druckmikrofonen muss man sich entweder für eine lineare Freifeldcharakteristik oder eine lineare Diffusfeldcharakteristik entscheiden. Dies kann durch die Wahl zwischen verschiedenen Grids für das Mikrofon bestimmt werden.
Spezielle Richtmikrofone
In bestimmten Situationen können Mikrofone mit einer stärkeren Richtwirkung erforderlich sein, als sie ein Mikrofon mit Nieren- oder Supernierencharakteristik bieten kann.
Interferenzrohr-Mikrofon
Ein Interferenzrohrmikrofon ist besonders nützlich, wenn eine gezielte Richtwirkung erforderlich ist. Sie werden oft als "Gun"- oder "Shotgun"-Mikrofon bezeichnet. Ein Interferenzmikrofon kann aus mehreren parallelen Rohren unterschiedlicher Länge bestehen, die senkrecht zum Mikrofonelement angeordnet sind. Am gebräuchlichsten ist jedoch ein einzelnes, engmaschiges Mikrofonrohr, das durch ein geschlitztes Hartschalenrohr geschützt ist.
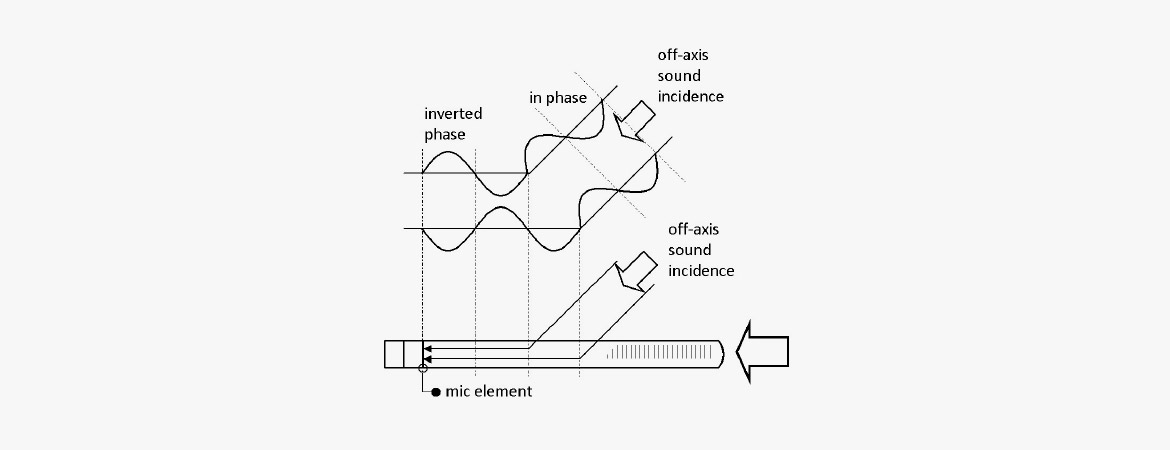 Abbildung 10. Interferenzrohr-Mikrofon
Abbildung 10. Interferenzrohr-Mikrofon
Beiden Konstruktionen gemeinsam ist das Funktionsprinzip: Trifft der Schall direkt in der Achse auf das Mikrofon, legen die Bestandteile der Schallwelle den gleichen Weg zurück. Dabei erreichen sie das druckempfindliche Element gleichzeitig und bleiben somit phasengleich.
Trifft der Schall aus anderen Winkeln auf das Mikrofon, so durchlaufen die einzelnen Teile der Schallwelle unterschiedliche Wegstrecken, um das druckempfindliche Element zu erreichen. Die einzelnen Druckanteile können daher nicht die gleiche Phase haben und bilden in der Summe einen Schalldruck, der deutlich geringer ist als der, der durch den direkten Schalleinfall gebildet wurde.
Die Ausblendung des seitlich einfallenden Schalls hängt von der Wellenlänge der betreffenden Schallwelle und dem Winkel ab, in dem der Schall einfällt.
Da das moderne Interferenzrohr als langes Rohr mit Schlitzen über die gesamte Rohrlänge konzipiert ist, bietet es eine gleichmäßigere Dämpfung des seitlich eintreffenden Schalls, als dies mit einer limitierten Anzahl an Schalleintrittsöffnungen möglich wäre. Allerdings muss eine akustische Dämpfung der Schallwellen vorgenommen werden, die dem druckempfindlichen Element am nächsten sind. Es geht also nicht nur um die Herstellung eines Rohres mit Schallschlitzen, sondern auch um eine geeignete Dämpfung des Rohres.
Da Interferenzen in einer Röhre erst bei Rohrlängen größer als die halbe Wellenlänge auftreten, kann die hohe Richtwirkung nur im oberen Frequenzbereich erzielt werden. Daher ist das Mikrofonelement (ohne Röhre) oft ein Nierenmikrofon, um eine gewisse Richtwirkung bei den tiefen Frequenzen zu erreichen.
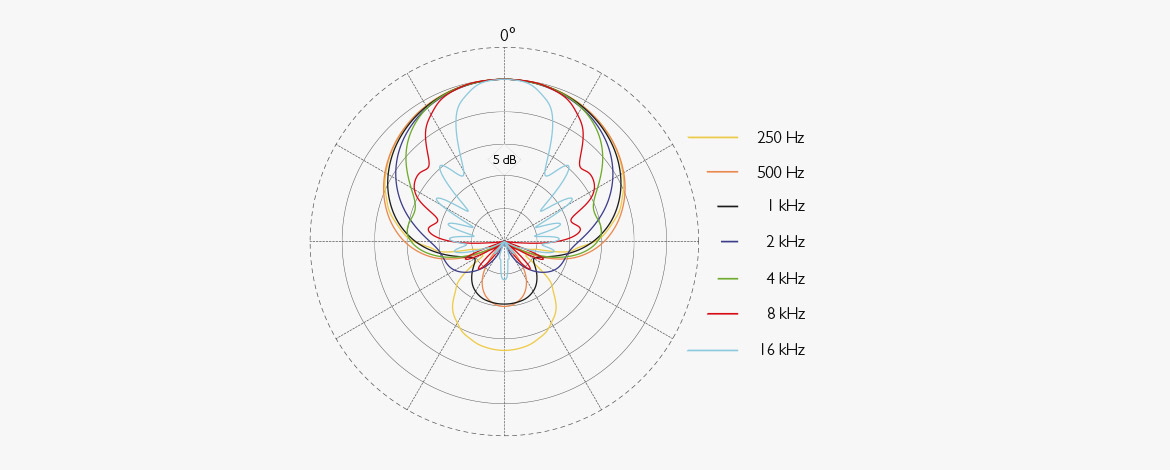 Abbildung 11. Richtcharakteristik eines Interferenzrohrmikrofons
Abbildung 11. Richtcharakteristik eines Interferenzrohrmikrofons
Ein Interferenzrohrmikrofon ist überwiegend in in einer Richtung empfindlich, weist jedoch zahlreiche Nebenkeulen auf. In vielen Fällen wird der Frequenzgang außerhalb der Mikrofonachse sehr ungleichmäßig. Der Klang, der von ihnen erfasst wird, ist zwangsläufig mehr oder weniger unschön gefärbt.
Zoom-Mikrofone
Das Zoom-Mikrofon ist so konstruiert, dass es einen variablen Richtungsfaktor aufweist. Dies wird erreicht, indem zwei Mikrofonelemente im selben Gehäuse untergebracht werden. Das eine ist als Interferenzrohrmikrofon ausgeführt und hat daher eine hohe Richtwirkung. Das andere kann ein reines Druckgradientenmikrofon erster Ordnung mit Nierencharakteristik sein.
Die stufenweise Überblendung von einem Mikrofon zum anderen erlauben eine variable Richtcharakteristik, die akustisch an die fotografische Zoom-Funktion erinnern. Ein Zoom-Mikrofon hat jedoch seine Grenzen, da der maximal erreichbare Richtfaktor 2 beträgt.
Parabolschirm
Es ist möglich, die Richtwirkung eines Mikrofons zu erhöhen, indem man es im Brennpunkt eines parabolischen Schirms platziert. Dieses Prinzip wird vor allem bei der Aufnahme von Vogelstimmen eingesetzt. Auch bei Sportübertragungen wird dieser Schirm genutzt.
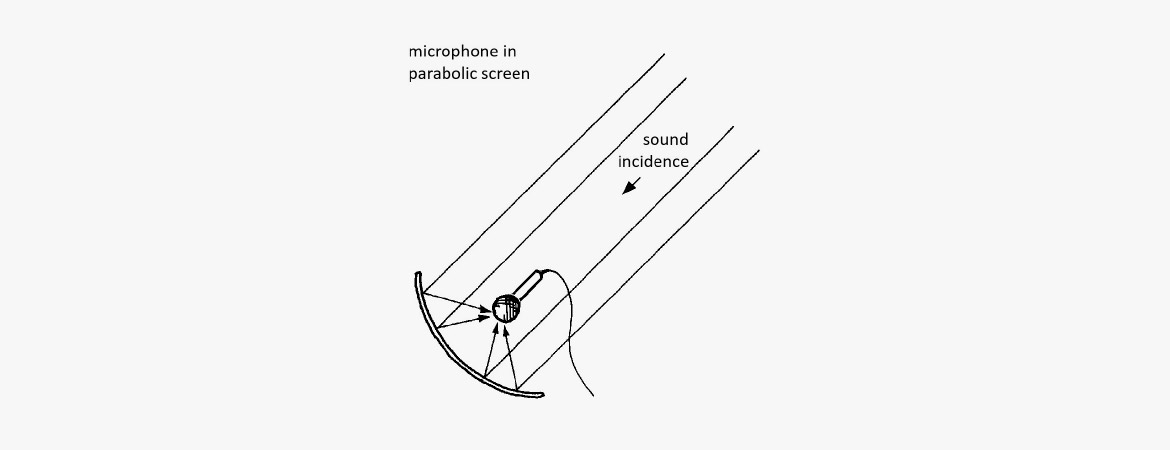 Abbildung 12. Mikrofone im Brennpunkt eines Parabolschirms
Abbildung 12. Mikrofone im Brennpunkt eines Parabolschirms
Da der Parabolschirm aus Gründen der Handhabung nicht zu groß sein darf, ergibt sich daraus auch eine Untergrenze für die Frequenzen, die reflektiert und damit verstärkt werden können. In der Praxis liegt diese Grenze etwa zwischen 500 und 1000 Hz. Unterhalb dieser Frequenz verhält sich das Mikrofon so, als gäbe es keinen Schirm.
Grenzflächenmikrofon
Ein Grenzflächenmikrofon (BLM, Boundary Layer Microphone) ist im Allgemeinen ein gewöhnliches Mikrofonelement, das akustisch auf eine bestimmte Art eingesetzt wird.
Wie der Name schon verrät, befindet sich dieses Mikrofon an der Grenzfläche oder Druckzone. Trifft Schall auf eine harte Oberfläche, wird der Schall reflektiert. Daher entsteht in unmittelbarer Nähe des reflektierenden Körpers ein Druckanstieg, der vom Mikrofon registriert wird. Der Druck an der Oberfläche ist also 6 dB größer als ohne reflektierende Oberfläche. Außerdem wird der Diffusschall nur um 3 dB verstärkt.
Platziert man ein Mikrofon direkt auf der reflektierenden Oberfläche, so erhält man ein 6 dB lauteres Signal. Die Fähigkeit des Mikrofons, weit entfernte Schallquellen zu erfassen, ist auf die Verbesserung des Verhältnisses von Freifeld zu Streufeld um 3 dB zurückzuführen.
 Abbildung 13a. Grenzflächenmikrofone
Abbildung 13a. Grenzflächenmikrofone
Das Grenzflächenmikrofon ist im Grunde ein Druckmikrofon. Es ist jedoch auch möglich, ein Richtmikrofonelement zu verwenden, wenn es sehr nahe an der reflektierenden Oberfläche positioniert wird.
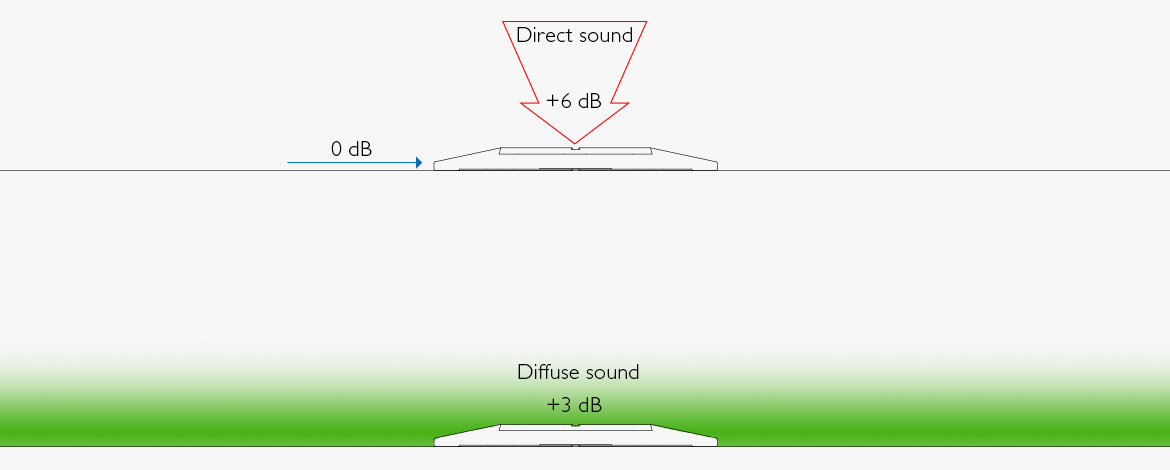 Abbildung 13b. Direktes und diffuses Schallfeld am Grenzflächenmikrofon
Abbildung 13b. Direktes und diffuses Schallfeld am Grenzflächenmikrofon
Anwendung von Signalbearbeitung
Wenn besondere Einegnschaften gewünscht sind, beispielsweise hinsichtlich der Richtcharakteristik, kann digitale Signalbearbeitung vorteilhaft eingesetzt werden. Ein Beispiel dafür ist das KEM (Kardioid – Ebenen – Mikrofon), das vom Institut für Rundfunktechnik entwickelt worden ist. Das Mikrofon verhält sich wie ein umgekehrter Säulenlautsprecher. Ein Array von Mikrofonelementen liefert Signale, und die Summierung / Filterung in der anschließenden digitalen Verarbeitung führt zu einer Richtcharakteristik, die fast als „flach wie ein Pfannkuchen“ bezeichnet werden kann.
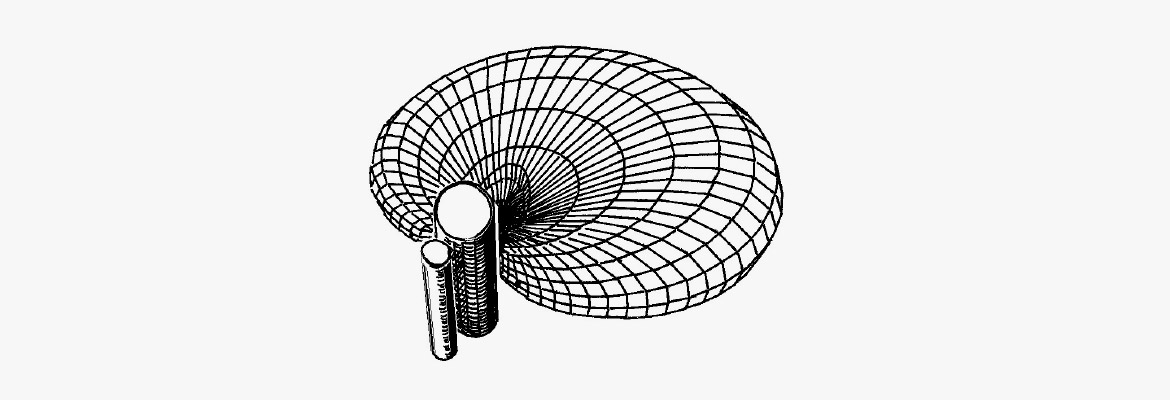 Abbildung 14. KEM (Kardioid Ebenen Mikrofon) Microtec Gefell
Abbildung 14. KEM (Kardioid Ebenen Mikrofon) Microtec Gefell
Beamforming wird durch die Verarbeitung der Signale vieler hintereinander oder auf einer größeren Fläche angeordneter Elemente erreicht (z.B. Deckenmikrofone, 600 x 600 m).
Das Wandlungsprinzip
Bisher haben wir uns nur damit beschäftigt, wie ein Schallfeld auf die Mikrofonmembran wirkt. Als nächstes sollten wir untersuchen, wie die Membranbewegung in ein elektrisches Signal umgewandelt wird.
In der professionellen Audiotechnik werden Mikrofone in zwei Hauptgruppen unterteilt:
Dynamische Mikrofone
- Tauchspulenmikrofone
- Bändchenmikrofone
Kondensatormikrofone
- NF-Kondensatormikrofone
- HF-Kondensatormikrofone
- Elektretmikrofone
- (Digitale Mikrofone)
Dynamische Mikrofone
Dynamische Mikrofone arbeiten nach dem Induktionsprinzip. Ein elektrischer Leiter bewegt sich aufgrund des Schalls in einem Magnetfeld. Dadurch wird an den Endpunkten des Leiters eine elektrische Spannung induziert, die proportional zur Geschwindigkeit des Leiters im Magnetfeld ist. Das Ausgangssignal ist somit um 90° phasenverschoben zum Schalldruck an der Membran.
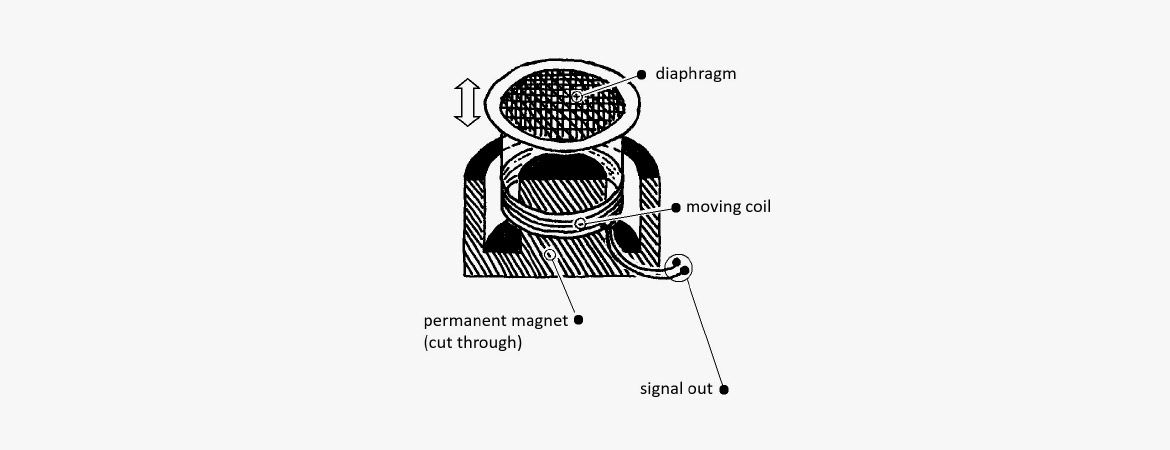 Abbildung 15. Arbeitsweise von Tauchspulenmikrofonen
Abbildung 15. Arbeitsweise von Tauchspulenmikrofonen
Tauchspulenmikrofone
Bei einem Tauchspulenmikrofon ist der Leiter als kleine Spule ausgeführt, die an einer Membran aus Kunststoff oder Metall befestigt ist. Die Spule befindet sich im Luftspalt eines starken runden Permanentmagneten. Der Aufbau ist dem eines elektrodynamischen Lautsprechers sehr ähnlich.
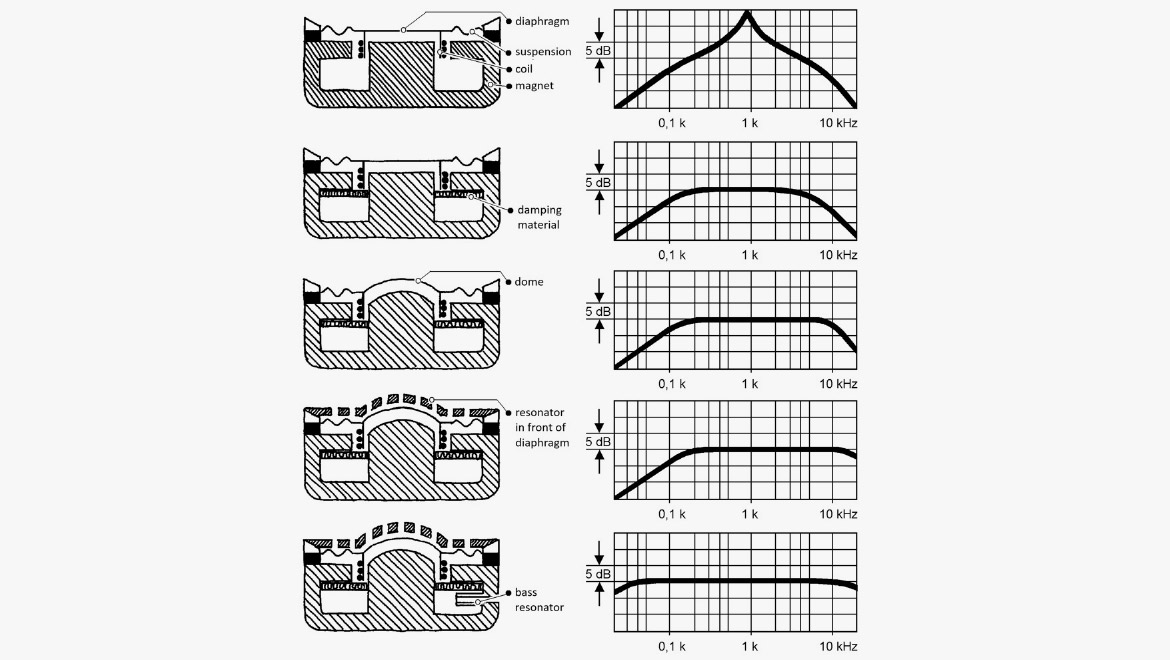
Abbildung
16. Kontrolle des Resonanzphänomens in dynamischen Tauchspulenmikrofonen
Man kann das elektrodynamische Mikrofon mit einem Masse-Feder-System vergleichen. Die Masse wird durch die Membran und die Tauchspule gebildet, während die Aufhängung wie eine Feder wirkt. Wie das mechanische System hat auch das Mikrofon eine Resonanzfrequenz. Bei Tauchspulenmikrofonen liegt die Resonanzfrequenz zwischen etwa 150 Hz und 800 Hz, d.h. genau in der Mitte des nutzbaren Frequenzbereichs. Um einen halbwegs linearen Frequenzgang zu erreichen, muss die Membran bedämpft werden. Dies geschieht in der Regel durch das Einbringen von Dämpfungsmaterial.
Im Laufe der Jahre mussten die Mikrofonhersteller mit den geeigneten mechanischen Designs experimentieren, um einen weiten Frequenzbereich zu erzielen. Durch Hinzufügen von Dämpfungsmaterialien, Kammern, Kanälen usw. wurden brauchbare Ergebnisse erzielt. Ein Tauchspulenmikrofon wird jedoch aufgrund von Resonanzphänomenen fast immer Einfluss auf den Klang haben. Dies ist einer der Gründe, warum Mikrofone so unterschiedlich klingen.
Bändchenmikrofone
Bei einem Bändchenmikrofon wirkt das Schallfeld direkt auf den Leiter, der in der Regel aus einer dünnen Metallfolie besteht. Die Folie ist zwischen den Polen eines starken Dauermagneten aufgespannt.
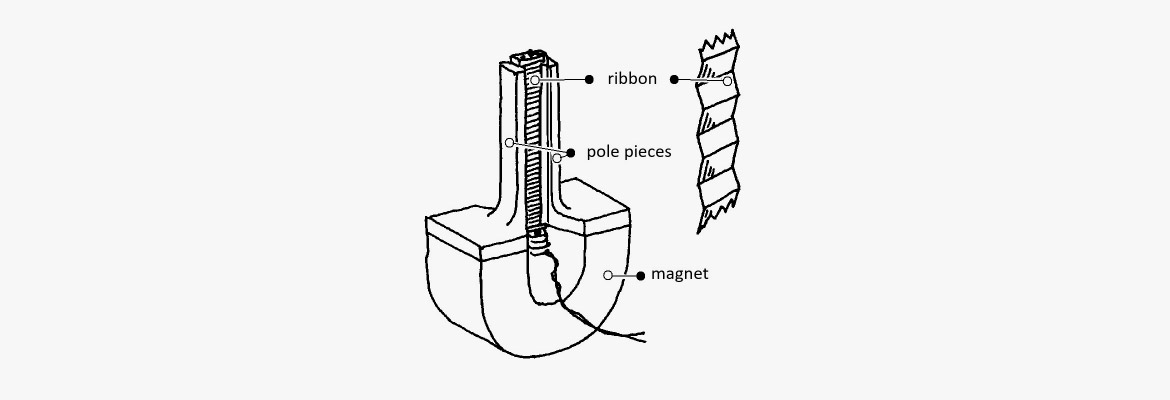 Abbildung 17. Bändchenmikrofone
Abbildung 17. Bändchenmikrofone
Wenn sich das Bändchen bewegt, wird an seinen Enden eine Spannung erzeugt. Da sowohl die Spannung als auch die Impedanz sehr niedrig sind, wird das Bändchen an einen im Mikrofon selbst eingebauten Übertrager gekoppelt.
Die Masse der Folie ist sehr gering, oft weniger als 0,5 mg. Die Aufhängung ist unglaublich weich, so dass das System eine Resonanz im Bereich von 20 – 70 Hz aufweist. Es ist also nicht, wie bei Tauchspulenmikrofonen, die Dämpfung, die den Frequenzgang bestimmt, sondern die Masse.
Erreicht der Schall beide Seiten des Bändchens, handelt es sich um ein reines Druckgradientenmikrofon mit einer Achter-Charakteristik. Die Polarität der beiden Keulen ist einander entgegengesetzt.
Bändchenmikrofone können auch akustische Kopplungen eingehen, wodurch sich andere Richtcharakteristiken ergeben.
Bändchenmikrofone sind aufgrund der locker aufgespannten Folie im Allgemeinen recht empfindlich gegenüber mechanischen Stößen und Windeinwirkung. Dafür haben sie eine relativ gute Transientenwiedergabe.
Kondensatormikrofone
NF-Kondensatormikrofone
Ein NF-Kondensatormikrofon besteht aus einer elektrisch leitenden Membran, die vor einer feststehenden Gegenelektrode aufgespannt ist. Wenn die Membran und die Gegenelektrode mit einer Vorspannung versorgt werden, wird zwischen den beiden Teilen ein elektrisches Feld erzeugt, ähnlich wie bei den Platten eines Kondensators. Dieses Feld strafft die Membran.
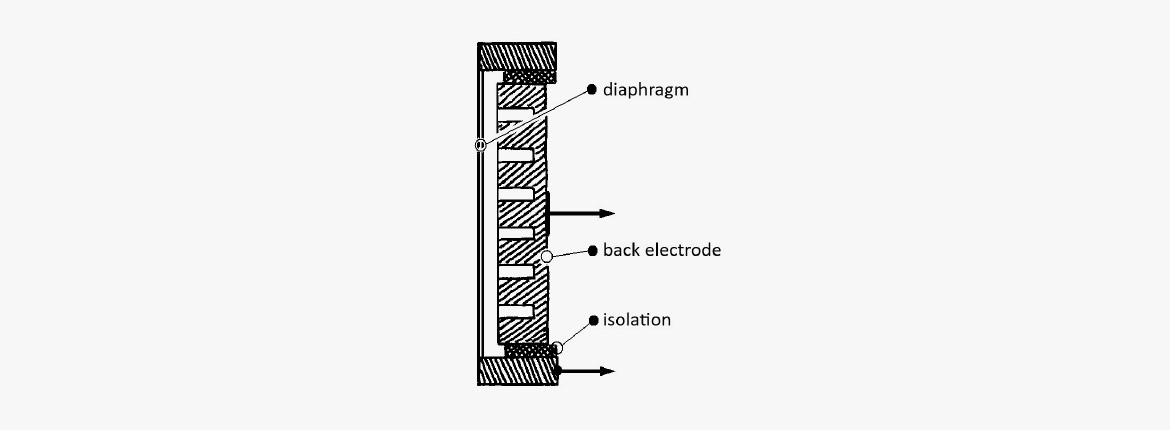 Abbildung 18. Arbeitsweise eines Kondensatormikrofons
Abbildung 18. Arbeitsweise eines Kondensatormikrofons
Wenn das Mikrofon beschallt wird, ändert sich der Abstand der Membran zur Gegenelektrode. D. h., die Kapazität ändert sich mit dem Schallfeld. Da die Ladung durch die elektrische Vorspannung konstant gehalten wird, ist die momentane Spannung des Kondensatormikrofons proportional zur Auslenkung der Membran aus der Neutralstellung.
Die Membran kann aus einer dünnen Metallfolie, z. B. aus Nickel, mit einer Stärke von 2-3 µm bestehen. Moderne Kondensatormikrofone haben Membranen aus einer Kunststofffolie mit einer aufgedampften Metallschicht, z. B. aus Gold. Diese Materialien ergeben eine geringe Masse; es kann jedoch notwendig sein, größere Membranen in ihrer Mitte zu stützen, damit die Membran und die Gegenelektrode nicht zusammentreffen und die statische Spannung kurzschließen.
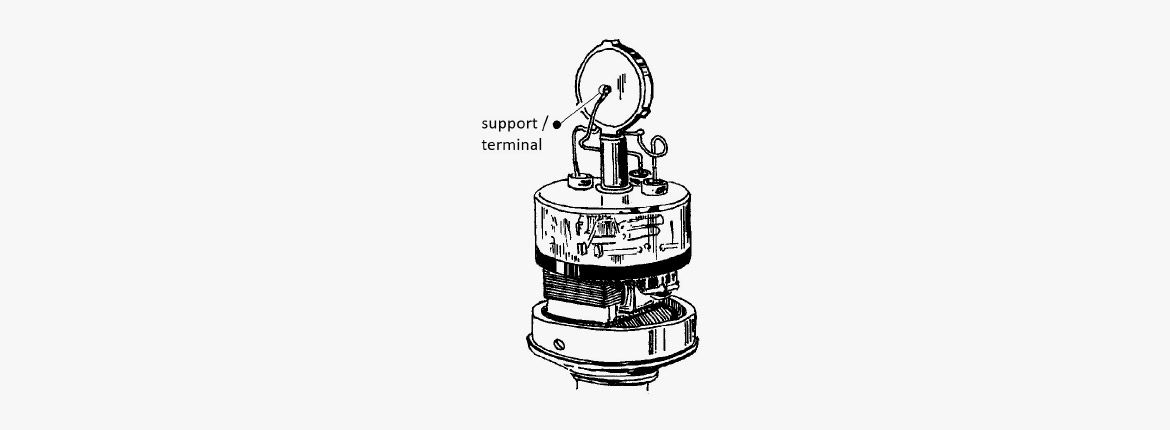 Abbildung 19. Doppelmembran-Kondensatormikrofone
Abbildung 19. Doppelmembran-Kondensatormikrofone
Auch beim Kondensatormikrofonsystem gibt es eine Resonanz, die aber deutlich höher im Frequenzbereich liegt als beim dynamischen Mikrofon. Die Dämpfung der Membran erfolgt in der Regel durch die Luft, die sich zwischen der Membran und der Gegenelektrode befindet.
Aufgrund der geringen Kapazität des Mikrofonkondensators (~ 50 pF) ist das System sehr hochohmig. Daher ist es notwendig, eine Verstärkerstufe in der Nähe des Mikrofonsystems zu platzieren, um das Signal in Pegel und Impedanz an Kabel und nachfolgende Eingänge anpassen zu können. Die resultierende Impedanz liegt normalerweise zwischen 20 und 200 Ω.
Die Empfindlichkeit des Kondensatormikrofons hängt von der Polarisationsspannung ab. Daher ist es möglich, verschiedene Richtcharakteristiken zu erhalten, indem man die Polarisation von entweder zwei getrennten Kapseln oder zwei Membranen, die auf jeder Seite einer gemeinsamen Elektrode angeordnet sind, kontrolliert.
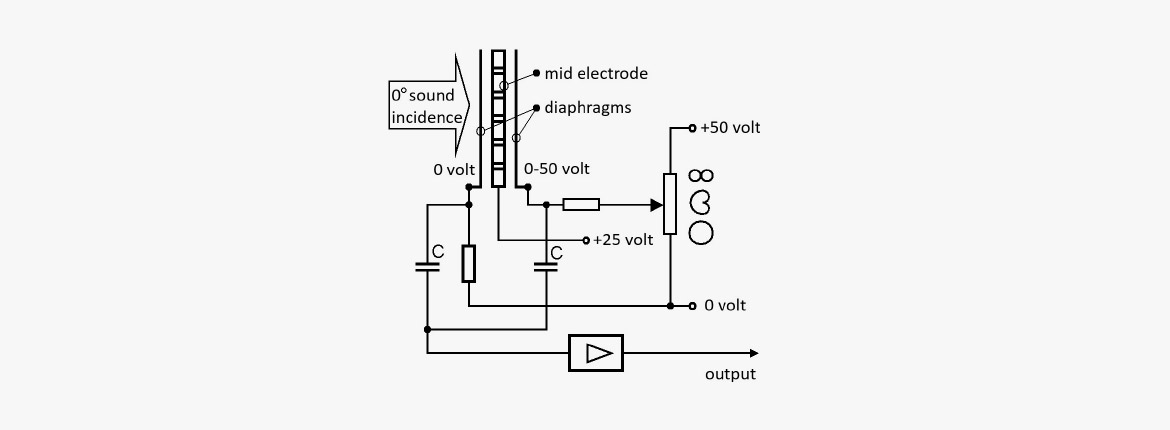 Abbildung 20. Schaltung für ein Doppelmembran-Kondensatormikrofon mit umschaltbarer Richtcharakteristik
Abbildung 20. Schaltung für ein Doppelmembran-Kondensatormikrofon mit umschaltbarer Richtcharakteristik
Abbildung 20 zeigt, wie man die drei Hauptcharakteristiken erhält: Kugel, Niere und Acht. Jede dazwischen liegende Variation ist ebenfalls möglich:
Vordere Membran 0 V
Mittelelektrode 25 V
Hintere Membran 0 V
Beide Membranen haben das gleiche Potenzial, 0 Volt, relativ zu den +25 Volt der Mittelelektrode. Diese Konfiguration führt zu zwei kardioiden Mustern, die entgegengesetzt gerichtet, aber in Phase sind. Durch elektrische Summierung der beiden Signale erhält man kugelförmige Richtcharakteristiken.
Vordere Membran 0 V
Mittelelektrode 25 V
Hintere Membran 25 V
Zwischen der Mittelelektrode und der hinteren Membran, die inaktiv ist, besteht kein Potentialunterschied. Was bleibt, ist die Nierencharakteristik der Frontmembran.
Vordere Membran 0 V
Mittelelektrode 25 V
Hintere Membran 50 V
An beiden Membranen liegt im Vergleich zur Mittelelektrode ein Spannungspotenzial von 25 Volt an. Da jedoch die eine negativ und die andere positiv ist, sind die Signale der beiden Systeme entgegengesetzt phasenverschoben, was zu der Achtercharakteristik führt.
HF-Kondensatormikrofone
Das HF-Kondensatormikrofon enthält neben dem Mikrofonkondensator einen Hochfrequenzoszillator und eine Demodulatorschaltung. Im Gegensatz zum NF-Kondensatormikrofon wird an den Kondensator keine Polarisationsspannung angelegt.
Andererseits moduliert die durch den Schall verursachte Kapazitätsänderung die Hochfrequenz des Oszillators, die typischerweise bei etwa 8 MHz liegt.
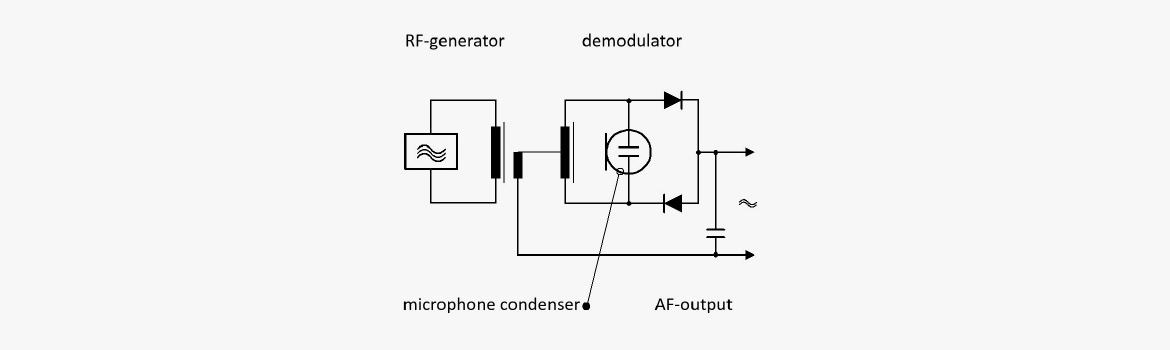 Abbildung 21. Arbeitsweise eines HF-Kondensatormikrofons.
Abbildung 21. Arbeitsweise eines HF-Kondensatormikrofons.
Die Demodulatorschaltung ermittelt dann das NF-Signal. Das Prinzip des HF-Kondensatormikrofons wird nur von wenigen Herstellern angewandt. Es hat jedoch gewisse Vorteile, da es relativ unkritisch gegenüber Feuchtigkeit und Isolationsfehlern ist.
Elektretmikrofone
Das Elektretmikrofon funktioniert im Grunde wie ein NF-Kondensatormikrofon. Im Gegensatz zu diesem muss beim Elektretmikrofon jedoch keine externe Spannung an die Kondensatorplatten angelegt werden.
Das Elektretmikrofon enthält Materialien, die analog zu einem Dauermagneten elektrisch vorpolarisiert werden. Materialien mit diesen Eigenschaften können entweder Kunststofffolien (Polyester, PVC, Teflon) oder keramische Elektretmaterialien sein. Die Polarisierung erfolgt, indem das Material erhitzt und beim anschließenden Abkühlen einem elektrostatischen Feld ausgesetzt wird, das bei Folien ca. 20 kV/cm beträgt. Beim Ausschalten des Feldes behält das Material eine Ladung bei, die einer Polarisationsspannung von beispielsweise 100 V entspricht. Die Polarisierung kann auch ohne Wärmezufuhr erfolgen. Wenn das elektrische Feld stark genug ist, ist eine Erwärmung möglicherweise nicht erforderlich.
Die Folien können als Membran und das keramische Elektrodenmaterial als Gegenelektrode (Rückelektrodenmikrofone) fungieren.
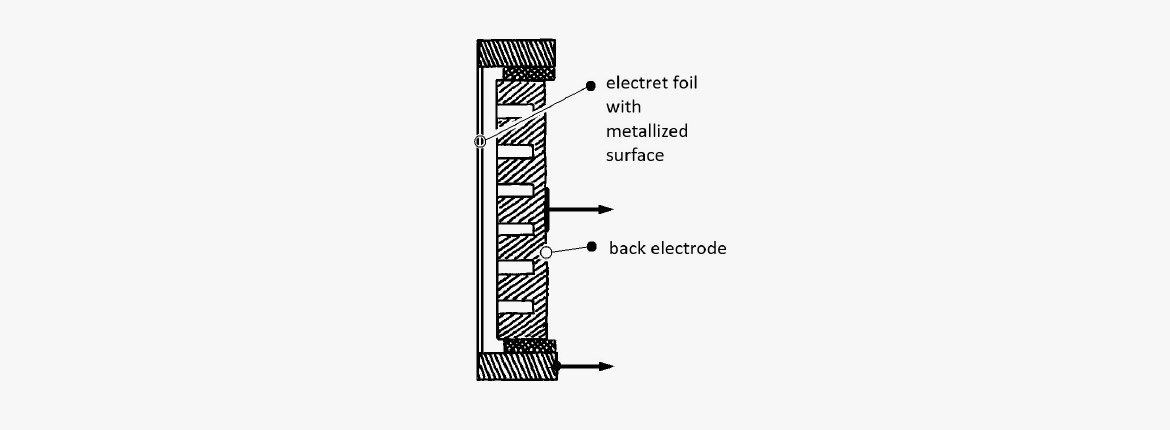 Abbildung 22. Arbeitsweise eines Elektretmikrofons
Abbildung 22. Arbeitsweise eines Elektretmikrofons
Wenn für ein solches Mikrofon dennoch eine Batterie oder eine andere externe Spannung erforderlich ist, so liegt das an dem eingebauten Verstärker (Impedanzwandler), der eine Versorgungsspannung benötigt.
Die Elektret-Materialien halten die statische Spannung inzwischen so gut, dass sie sogar in Messmikrofonen verwendet werden, bei denen sonst hohe Anforderungen an die Empfindlichkeit gestellt werden.
Digitale Mikrofone
In der Praxis gibt es drei Möglichkeiten:
- Analoge Mikrofone mit eingebauten AD-Wandlern
- Analoge Mikrofone mit zugehöriger digitaler Signalverarbeitung
- Halbleitermikrofone (hier nicht erwähnt)
Analoge Mikrofone mit eingebauten AD-Wandlern
Diese Gruppe von Mikrofonen trägt im Wesentlichen die Bezeichnung digitale Mikrofone. Das akustische Signal ist analog, ebenso wie die verwendete Mikrofonkapsel. Das System basiert darauf, dass das Signal unmittelbar nach der Kapsel mit einem im Mikrofongehäuse selbst eingebauten Wandler in einen digitalen Datenstrom umgewandelt wird.
Die digitalen Daten und der physische Teil der Schnittstelle basieren auf dem AES3-Standard. Im Jahr 2001 wurde eine Norm für die Schnittstelle veröffentlicht, die in Verbindung mit dieser Mikrofongruppe verwendet werden soll: AES 42-2001 (aktuelle Version AES42-2019). Die Norm ist allgemein anerkannt, und es wird erwartet, dass alle digitalen Mikrofone, die in der professionellen Tonproduktion eingesetzt werden, dieser Norm entsprechen.
Arbeitsweise
Bei den vorhandenen Mikrofonen befindet sich der Wandler unmittelbar nach der Mikrofonkapsel, die vom Typ Kondensator ist. Ein Dämpfungsglied, das die Dämpfung des Mikrofons sicherstellt, befindet sich in der Regel ebenfalls vor dem Wandler. Bei einem Kondensatormikrofon besteht ein Dämpfungsglied aus einem parallel zur Kapsel geschalteten Kondensator, wodurch die Ladung der Kapsel bei verringerter Empfindlichkeit reduziert wird.
Der eingebaute Wandler muss in der Lage sein, die Gesamtdynamik des Mikrofons zu bewältigen. Gute Mikrofonkapseln können einen Dynamikbereich von 125-140 dB haben, was mindestens die gleichen Anforderungen an den Wandler stellt. In der Praxis hat man Lösungen gesehen, bei denen eine Art Kaskadenkopplung von zwei Wandlern vorgenommen werden muss, um die erforderliche Dynamik zu erreichen.
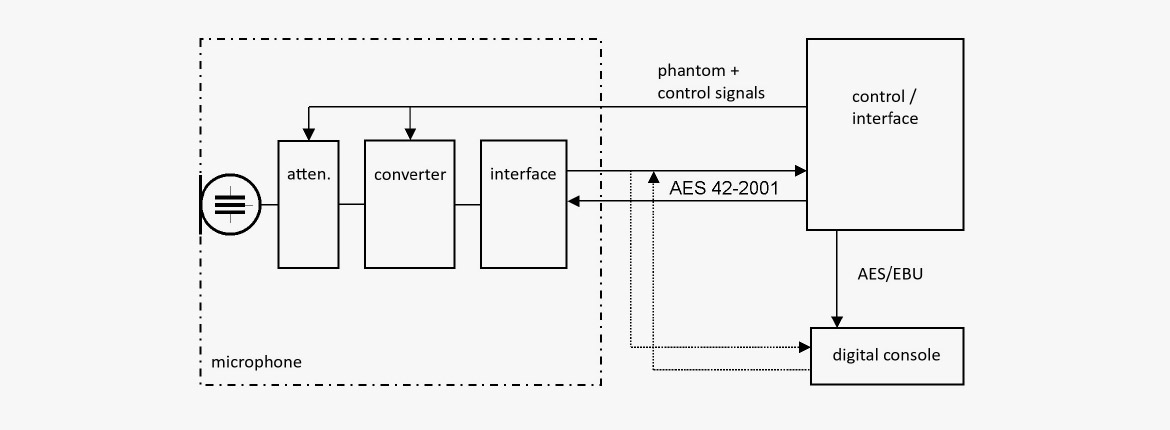 Abbildung 23. Arbeitsweise eines digitalen Mikrofons
Abbildung 23. Arbeitsweise eines digitalen Mikrofons
Schnittstelle
Um mit der Außenwelt zu kommunizieren, muss der Ausgang des Wandlers auf eine standardisierte Schnittstelle formatiert werden. AES42-2019 basiert auf dem bereits bekannten AES3-Format. Dabei handelt es sich um eine serielle Schnittstelle, über die Audiodaten von zwei Kanälen zusammen mit verschiedenen nützlichen Statusinformationen wie der aktuellen Abtastfrequenz, dem Timecode, der Definition des analogen Referenzpegels usw. übertragen werden können. Das Signal kann über ein zweiadriges Kabel mit XLR-Steckern geführt werden.
AES42-2001 kann ebenfalls zwei Signale seriell in einem zweiadrigen Kabel übertragen. Das Interessante daran ist, dass gleichzeitig Fernsteuersignale an das Mikrofon übertragen werden können, zusammen mit einer Phantomspannung zur Versorgung des Mikrofons. Auf diese Weise wird es möglich, Dämpfung, Richtcharakteristik, Filterung und verschiedene Signalverarbeitungen über Steuergeräte oder Mischpulte einzustellen, die für digitale Mikrofone vorbereitet sind. Voraussetzung dafür ist natürlich, dass das Mikrofon über diese Optionen verfügt.
Das AES42-2019-Signal kann in eine bestimmte Fernsteuerungskonsole oder in ein Mischpult eingespeist werden, wenn dieses ansonsten über einen digitalen Mikrofoneingang mit der Möglichkeit zur Steuerung der einzelnen Parameter verfügt. Für die digitale Synchronisation wird in der Regel ein externer Mastertakt benötigt, nicht zuletzt, wenn mehr als ein digitales Mikrofon verwendet werden soll.
Analoge Mikrofone mit digitaler Signalverarbeitung
Wenn besondere Einegnschaften gewünscht sind, beispielsweise hinsichtlich der Richtcharakteristik, kann digitale Signalbearbeitung vorteilhaft eingesetzt werden.
Ein Beispiel: Das Townsend Labs Sphere ist ein Doppelmembranmikrofon, das über ein digitales Plug-in gesteuert werden kann. Im Plug-in werden die einzelnen Membransignale verarbeitet, um den charakteristischen Klang verschiedener Mikrofone zu imitieren.
Ein weiteres Beispiel für die digitale Verarbeitung ist ein Array-Mikrofon wie das Eigenmike von MH Acoustics. Dieses Mikrofon enthält 32 analoge Kapseln (Elektret), die auf der Oberfläche einer starren Kugel angeordnet sind.
Objektive Eigenschaften
Siehe unser Artikel
"So liest du technische Daten von Mikrofonen"
Quellen
Brixen & Voetmann: Praktisk Elektroakustik.
Teknisk Forlag 1987, Musikforlaget Fog 1996, 2011.